La participation des ingénieurs de l’ENAC au projet CLUG : limiter l’erreur multi-trajet
L’ENAC – l’Ecole Nationale de l’Aviation Civile – est une école d’ingénieurs française, qui forme les cadres de l’aviation civile, des spécialistes du trafic aérien, des communication aéronautiques et de la surveillance. L’ENAC contribue aussi à la modélisation des erreurs locales de GNSS et à l’intégrité du système au sein du projet CLUG.
Ebauche de projet et problème principal
En matière de sécurité des transports terrestres, l’utilisation du GNSS (Géolocalisation et Navigation par un Système de Satellites, comme Galiléo ou le système GPS) ne se limite pas à la voiture autonome. L’industrie ferroviaire cherche également à utiliser le GNSS comme principal outil sécurisé de localisation des trains, afin d’améliorer la signalisation automatique et, à l’avenir, permettre la conduite des futurs trains autonomes. Ainsi, le capteur-récepteur GNSS constitue un des éléments-clé de l’unité de localisation imaginé dans le cadre du projet CLUG. Les corrections SBAS (Satellite Based Augmentation Systems, tels EGNOS pour l’Europe) permettront de corriger de nombreuses erreurs de mesure de la portée GNSS. Cependant, les erreurs purement locales sont cruciales dans la performance de l’architecture de fusion et dans la surveillance de l’intégrité.
Concept d’intégrité et nécessité d’un modèle d’erreur
En plus de fournir une solution de localisation, un système de navigation sécurisé doit être en mesure de fournir, en temps voulu, des avertissements aux utilisateurs lorsque la sécurité de la position ne peut être garantie dans des probabilités prédéfinies. Cette capacité s’appelle l’intégrité du système. L’algorithme d’intégrité fournit un niveau de protection, lié aux probabilités plus ou moins fortes d’une erreur de position. Il est donc essentiel, afin que l’algorithme d’intégrité fonctionne correctement, d’y intégrer les paramètres du modèle des sources d’erreur attendues. L’erreur multi-trajet constitue l’erreur la plus courante et la plus critique pour le concept d’intégrité, en particulier dans les zones urbaines et périurbaines.
Les caractéristiques de l’erreur multi-trajet et sa modélisation
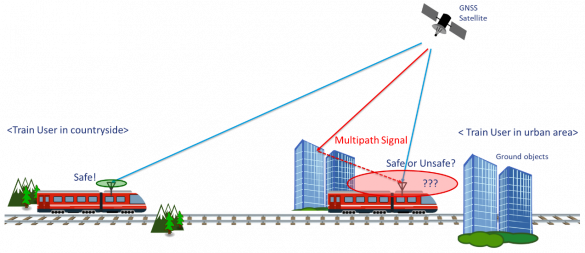
L’effet multi-trajet désigne le phénomène d’un signal atteignant une antenne via deux ou plusieurs chemins. Une antenne peut en effet recevoir le signal direct, ainsi qu’une ou plusieurs de ses réflexions, issues d’installations au sol ou dans l’environnement proche. Le signal réfléchi est une version retardée et souvent (mais pas systématiquement) plus faible que le signal direct. Les mesures de portée subséquentes dérivées de la somme des signaux reçus entrainent des erreurs de portée brutes (biaisées et/ou brouillées) et mènent à une position potentiellement dangereuse.
La modélisation de l’erreur multi-trajet n’est pas simple, en raison de l’implication complexe de nombreux facteurs dont le paramètre géométrique, la dynamique de l’utilisateur et les caractéristiques de l’environnement. De plus, sa distribution (son interprétation mathématique) a généralement une moyenne non nulle, une grande variance et un biais positif dans de nombreuses situations.
Actuellement, dans le cadre du projet CLUG, l’ENAC mène des recherches sur les techniques d’apprentissage automatique permettant de modéliser plus finement les effets des erreurs multi-trajet. Les techniques d’apprentissage automatique facilitent le choix des paramètres à utiliser afin d’obtenir le modèle le plus fin, le plus serré de distribution (d’interprétation mathématique). Les résultats préliminaires seront présentés lors de la conférence ION GNSS+ 2021. Des informations plus détaillées sont disponibles sur le site ION sous ce lien.
Adresse du lien : Machine Learning Based Overbound Modeling of Multipath Error for Safety Critical Urban Environment | Technical Program - ION GNSS+ 2021